
We can only learn so much about ocean ecosystems through the use of shipboard sensors & systems, divers and satellites. Submersibles, both human occupied and remotely operated, allow us to travel deeper and with a greater degree of freedom than ever before. They provide immediate seafloor observation and targeted sample retrieval for scientists at sea so that we can observe, describe and ultimately explain life in the deep ocean.
Human Occupied Vehicle (HOV) ALVIN
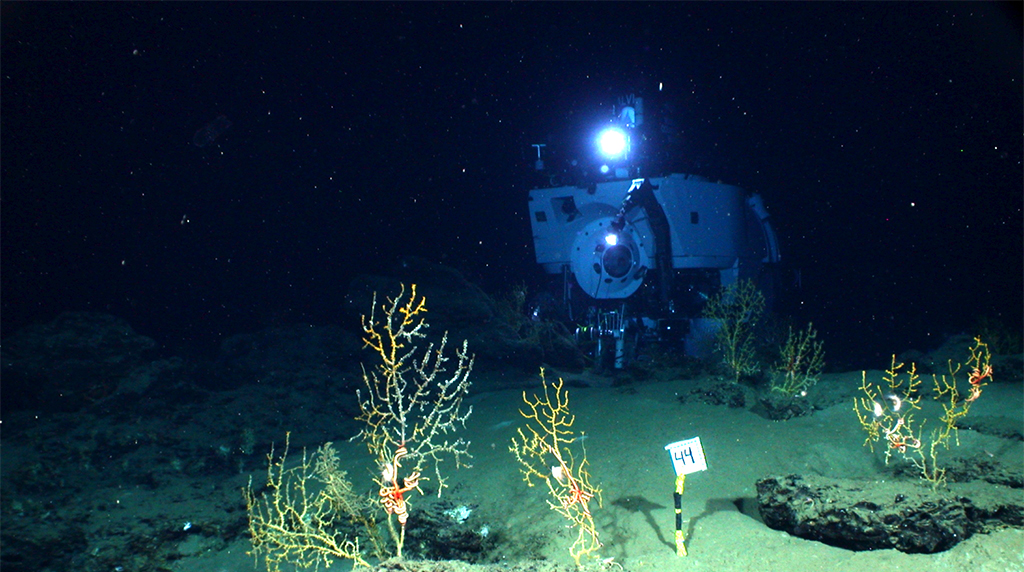
ALVIN provides "eyes-on-the-bottom" exploration and research. ALVIN began operations in 1964, has made more than 4,600 dives, and has gone through numerous overhauls and upgrades, the most recent being completed in 2013. ECOGIG investigators used ALVIN during its last days in December 2010, right before the latest upgrade. ECOGIG again used the submersible in April 2014 after the upgrade, for dives 6-10 hours long. ALVIN can hover in the water, maneuver over rugged terrain, and rest on the seafloor. It has still and video cameras, five viewports, high-intensity lights for vision in the otherwise lightless deep sea, two robotic arms for manipulating instruments, and a basket for transporting samples back to the surface. Visit Woods Hole Oceanographic Institute's site dedicated to ALVIN for more information about the U.S. Navy owned and WHOI operated vehicle.
Remotely Operated Vehicle (ROV)
A ROV is an unmanned underwater robot operated from a research ship either by cable or remote control. It may have various tools attached to it, such as arms for moving and gathering samples and equipment, cameras, and lights that are also controlled from the ship. ROVs make depths accessible that are otherwise inaccessible due to conventional diving limitations and limited manned submersible resources.
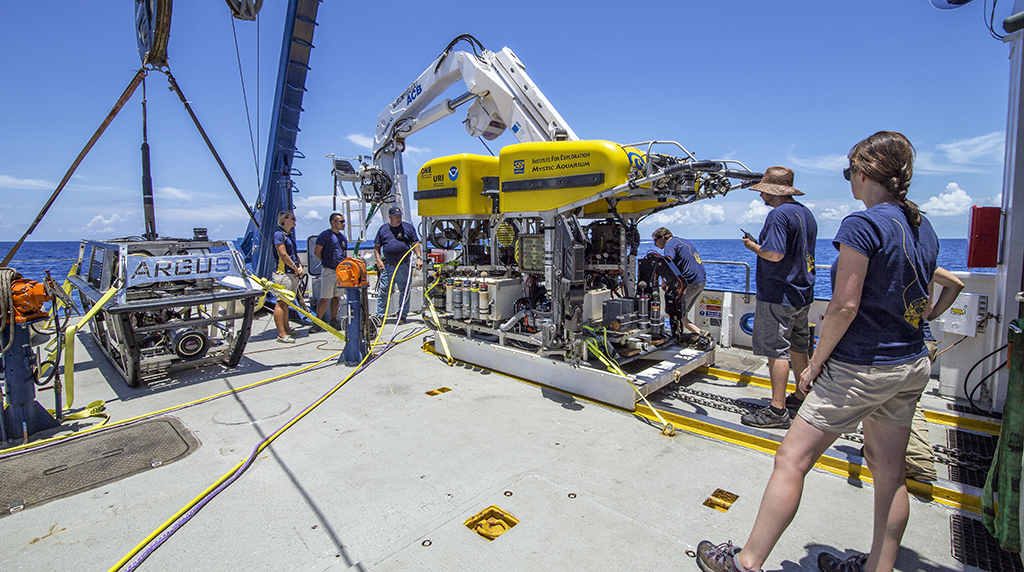
Towsled ROV's, such as the ROV Argus (operated by Ocean Exploration Trust/Nautilus) are tethered via a steel-armored fiber-optic cable directly to a ship. Argus is very heavy and is connected directly to the ship, so it can only be positioned by moving the ship. Argus can be used in two different modes of operation: alone, or with another ROV. Alone, Argus is towed behind the ship for broad-area visual and/or sonar surveys.
Argus is typically used in conjuction with ROV Hercules (operated by Ocean Exploration Trust/Nautilus). In this tandem mode, Hercules is connected to Argus via a 30 m fiber-optic tether. Tandem ROV operations are carried out for a number of reasons. First, Argus removes the heave of the ship from Hercules so that it can work on the seafloor as a stable platform; second, Argus provides light from variable angles to lessen the backscatter caused by particles in the water; and third, Argus is equipped with a number of cameras so that it can watch over Hercules while it works on the seafloor, giving shipboard operators an eye-in-the-sky perspective.
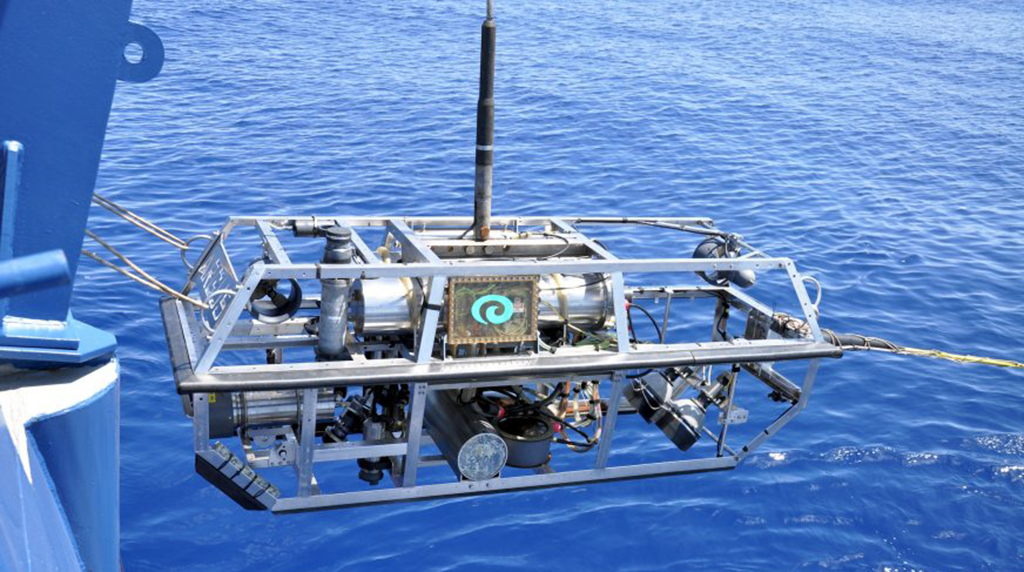
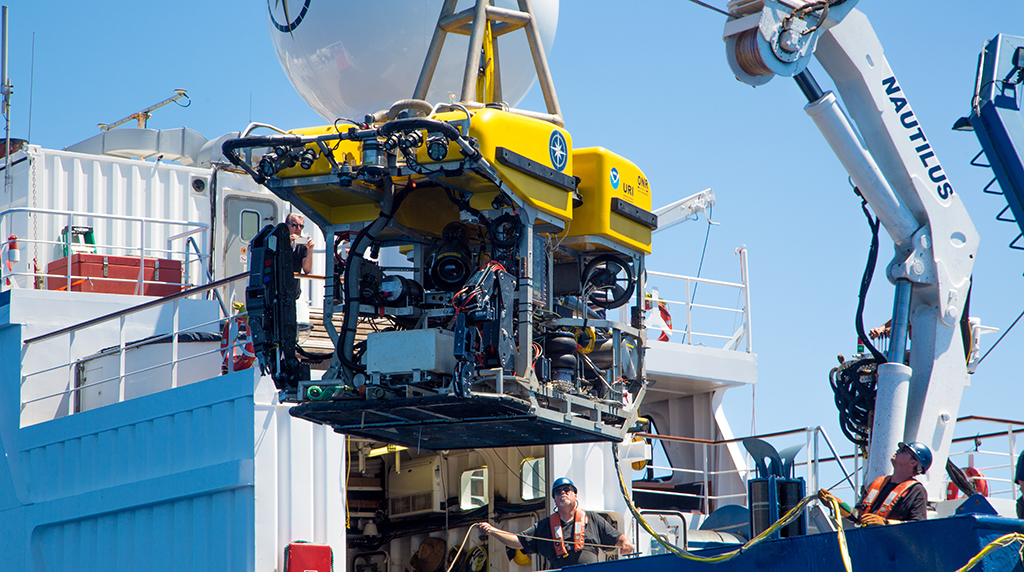
Hercules is a ROV that is used exclusively in conjunction with Argus, to which it is connected with a 30m length of neutrally buoyant tether. It is launched and recovered with the deck crane, generally over the side of the ship's fantail.
Hercules is the vehicle with the most maneuverability and is used for the most precise and delicate operations. Hercules is equipped with six thrusters that allow it to ‘fly’ in any direction, like a helicopter. Because the vehicle is slightly positively buoyant, it will gently float up to the surface if its thrusters stop turning.
Hercules can conduct a variety of precision documentation functions, including: close-up visual inspection using its high definition video camera, surface sampling using its two manipulator arms that can place recovered samples into sample drawers or place them in elevators dropped to the bottom from the surface ship above, or precision acoustic and visual mapping of a site using its high-resolution sonars and/or digital stereo still cameras.